第一指导教师主要成果:
1、主持江苏省高校哲学社会科学研究思政专题项目1项;
2、主持校思想政治工作专项课题1项;
3、在省级期刊杂志上发表学术论文4篇,参编教材1本;
4、申请专利3项。
一、申请理由:
一、申请理由(包括自身具备的知识条件、自己的特长、兴趣、已有的实践创新成果等)
二、
自身具备的知识条件
通过前期对集成电路以及语言编程的课程的学习,对于基础电路有了初步的认识与判别能力,并通过在课余时间线上课程的学习以及线下到图书馆资料室查阅资料,自学了一部分关于单片机以及逻辑电路方面的相关基础知识,对于单片机的基础理论知识已有初步了解并可以简单地利用单片机的一些功能。
自己的特长和兴趣
个人优势在于自学能力强,平时会根据个人的需求,通过技术论坛和慕课等学习平台有针对性地与相关领域工作者交流知识经验;知识面广,长期关注物联网发展动态对于相关的产品和功能概念有更深的了解;动手能力强,成功拆解维修过一些电子产品;敢于大胆尝试新奇事物,以此满足对科技创新的部分需求。作为一名科技爱好者,了解电子信息和逻辑电路领域行业标准,热衷于分析产品功能的实现的逻辑原理,这也是自己申请做此项目的根本动力所在。
已有的实践创新成果
大学入学初期,和室友共同完成电路板的初期焊接并测验成功,在老师的指导下成功制作网线并通信,和科协小组成员合作制作充电台灯。
其他
申请此次激光脉冲测速仪研究与设计项目,既是基于自己的兴趣爱好,渴望通过开发实践发现适合实际生活环境的实用产品,提升办公效率。同时也是希望自己能够学以致用,在校期间将自己的所思所学用于实践创新。将所学知识充分运用起来,通过市场调研、需求分析直到最后的产品原型设计与打磨调试,让自己亲历真实的项目开发流程。也希望在实践创新的过程中能够与身边的专业老师与同学有更多的交流、合作,提升自己的综合能力水平和各方面素质。
二、项目方案:
1.项目研究背景(国内外的研究现状及研究意义、项目已有的基础,与本项目有关的研究积累和已取得的成绩,已具备的条件,尚缺少的条件及方法等)
国内外的研究现状及研究意义
目前,国际上所采用的流行的“流动电子警察”或“可搬移电子警察”主要由:激光测速仪、雷达测速仪与摄像机或照相机的组合而成。
雷达测速的原理是应用多谱勒效应,即移动物体对所接收的电磁波有频移的效应,雷达测速仪是根据接收到的反射波频移量的计算而得出被测物体的运动速度。因此,具有以下特点:
1、雷达波束较激光光束(射线)的照射面大,因此雷达测速易于捕捉目标,无须精确瞄准。
2、雷达测试误差较大。
3、雷达发射的电磁波波束有一定的张角,故有效测速距离相对于激光测速较近。
4、测速雷达如果天线放置不当,当地势为非平原状态时,会使目标车的读数被其它车的速度代替。
5、如果目标旁边有反射能力更强的物体存在,测速雷达也只能测到反射能力强的物体。
6、当有两车并行时,雷达测速仪无法分辨出哪一辆车是超速车辆。
7、当测量信号经过多次反射后,测速雷达测出的结果也会出错。
8、无线电波会对测速雷达产生干扰,使测量结果失真。
9、雷达感应器可以侦察到雷达测速仪却极难侦察到激光测速仪的存在。
激光测速仪是采用激光测距的原理。激光测距(即电磁波,其速度为30万公里/秒),是通过对被测物体发射激光光束,并接收该激光光束的反射波,记录该时间差,来确定被测物体与测试点的距离。激光测速是对被测物体进行两次有特定时间间隔的激光测距,取得在该一时段内被测物体的移动距离,从而得到该被测物体的移动速度。因此,激光测速具有以下几个特点:
1、由于该激光光束基本为射线,估测速距离相对于雷达测速有效距离远,可
测1000M外。
2、测速精度高,误差<1公里。
3、鉴于激光测速的原理,激光测速器不可能具备在运动中使用,只能在静止状态下应用;所以一般交警都把仪器放在巡逻车上,停车静止使用。
4、目前大部分国家所采用的激光测速仪使用的是一类安全激光,对人眼睛安
全。
5、激光测距仪的耗电量比较低,两节五号电池可以连续使用20小时。
现在国外交通部门已经开始大规模采用激光测速系统,但在国内各单位采用的激光测速仪大部分都采是通过国外进口,高昂的价格成为大批量使用激光测速
仪的一个瓶颈,如果能够研制出原理简单,价格适中的一款新型的激光脉冲测速
仪,将会对各个行业的测距测速工作提供有力的保证!
项目已有的基础
激光测速的主要方法有脉冲法和相位法。由于相位法对光路要求非常严格,设计复杂,根据现有成熟的脉冲激光测距的理论和研究,我们提出了有关激光脉冲测速的基本理论。
本项目有关的研究积累和已取得的成绩
脉冲激光测速系统的工作原理是建立在激光测距的基础之上,通过对被测物体进行两次或多次有特定时间间隔的激光测距,取得在该时段内被测物体的移动距离,从而得到该被测物体的平均速度。
脉冲法的激光测速系统比相位法简单,更易于操作,但是不管脉冲法还是相位法激光测速系统对于测量角度要求都非常高,测速系统应该正对运动物体的运动方向,测量偏差角度应该小于10度,这样才能保证准确测量。
已具备的条件
由于激光传输速度相当于光速,在测试过程中,激光脉冲的宽度,激光脉冲之间时间间隔,光电信号之间的相互转换,激光脉冲驱动电路的时延特性都将影响到测量数据的精确度和整个系统的性能。
尚缺少的条件及方法
<1>激光测距受环境影响较大,在大雾天气,光线漫反射严重。
<2>激光脉冲的宽度,激光脉冲之间时间间隔,光电信号之间的相互转换,激光脉冲驱动电路的时延特性都将影响到测量数据的精确度,如何减少数据失效。
2.项目研究目标及主要内容
本项目研究工作主要包括两个方面:对以前的激光测速系统进行修改,对新的激光脉冲测速系统进行设计并调试。
脉冲激光测速是利用激光脉冲持续时间极短,能量在时间上相对集中,瞬时功率很大的特点对物体的距离以及位移进行测量,在有合作目标的情况下,脉冲激光测速范围可以达到极远的测程,如果精度要求不高,即使不使用合作目标,只是利用被测目标对脉冲激光的漫反射所取得的反射信号,也可以进行测速。
系统工作时,激光由发射单元发射,以光速到达目标物后反射回来被接收单元接收通过位移计算得到在单位时间内被测目标的位移距离,进而由连续测量距离得到某段时间内的平均速度,因为这个测量时间极短,因此这个平均速度可以认为是瞬时速度,即实现脉冲激光的测速。
激光脉冲测速的工作过程如下:当系统对准目标(如汽车车牌)后,激光器发出一个很强很窄的连续的激光脉冲,这个光脉冲经过双胶合透镜,压缩发射角使得激光器产生一个发散角只有几个毫弧度的平行光发射(即激光器的准直系统)。这样光脉冲发射到几公里以外的地方,也只有几米直径的一个光斑,一般我们实际测量的距离为300米左右,这样光斑就更小。
射向目标的光脉冲由于目标的漫反射作用,总有一部分光从原路反射回来,于是射向目标的光脉冲在经过双胶合透镜汇聚后射向目标点,经目标点反射回来的散射光先经过窄带滤波片滤除杂波,自由双胶合透镜将微弱的反射光汇聚到小面积的光电探测器上,经过光电转换变成点脉冲,再经过放大整形电路而进入时间测量系统,当系统探测到第一个脉冲的时候开始计数,随着下一个脉冲的到来,计数器将数值送到一个寄存器中寄存,再下一个脉冲到来之后,两个数值进行相减,就是物体在单位时间内的位移距离。
3.项目创新特色概述
(1) 用脉冲法测量速度相比于相位法测量更加简单,易于操作,通过多次测量特定时间脉冲数量即可计算平均速度。
(2) 脉冲激光测速是利用激光脉冲持续时间极短,能量在时间上相对集中,瞬时功率很大的特点对物体的距离以及位移进行测量,在有合作目标的情况下,脉冲激光测速范围可以达到极远的测程。
(3) 脉冲激光器的频率高,可进行较好的计数功能,极大提高了计数精度。
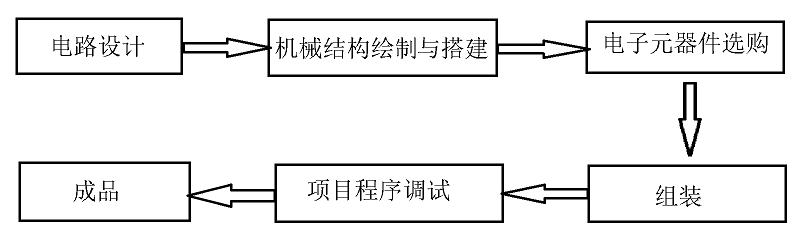
4.项目研究技术路线
5. 研究进度安排
2021年5月至2021年7月完成机械结构设计及电气部分设计。
2021年8月至2021年10月完成机械结构及电气部分草图,零部件定制及元器件购买,提交实用新型专利申请;
2021年11月至2022年1月完成项目的机械结构的装配;
2022年2月至2022年4月完成项目控制器部分的调试;
2022年5月整理结题资料,准备结题。
6、项目组成员分工
侯光知 项目第一主持人,主要负责项目的架构设计,技术实施
张建华 项目第二主持人,负责重要核心装置的设计、零部件定制及元器件购买;
杨瑞 项目组成员,负责机械装配、实物建模;
三、学校提供条件:
1.相关扶持政策:学校制定《无锡职业技术学院创新创业教育项目实施办法(试行)》(锡职院〔2013〕23号)文件。
2.学校提供实训实验室及工具使用。
3.学校配备专业的指导老师给予指导。
4.学校提供配套经费6000。
五、经费预算:交通费:3(%),资料费:3(%),元器件费:68(%),药品费:0(%),测试费:10(%),邮费:0(%),复印费:3(%),办公用品费:0(%),版面费:3(%),通讯费:10(%)