第一指导教师主要成果:2019年获评江苏“青蓝工程”优秀青年骨干教师培养对象,主持省级教改课题1项,主持省级精品课程资源1项,申请专利5项,其中发明受理2项,分别为“一种基于机器视觉的产品缺陷识别方法”、“一种贴膜系统及方法”;发表论文二十余篇。主要参与国家装备预研项目c两项-智能装配工艺技术/军用电子智能微组装工艺及仿真技术研究;主要参与江苏省教学能力大赛,获一等奖1项,二等奖3项;指导学生参加省级技能大赛,“制造单元智能化改造与集成技术”项目获省级二等奖,“工业机器人技术应用项目” 项目获省级二等奖;指导学生毕业设计,获省级优秀毕业设计团队1项,个人优秀毕业设计三等奖1项。
一、申请理由:
自身具备的知识条件
系统地掌握机械领域宽广的技术理论基础知识,主要包括力学、机械学、机械工程材料、机械设计工程学、机械制造基础等基础知识;
具有机械专业必需的制图、计算、测试、文献检索和基本工艺操作等基本技能及较强的计算机和外语应用能力;
具有机械专业领域内机器视觉方向所必要的专业知识,了解其科学前沿及发展趋势;
具有初步的科学研究、科技开发及组织管理能力;
具有较强的自学能力、创新意识和较高的综合素质。
自己的特长和兴趣
我的优势是自学能力强,平时会根据个人的需求,通过技术论坛和大学慕课等平台有针对性地与同领域工作者交流知识经验;知识面广,长期关注科技发展动态对于相关的产品和功能概念有更深的了解。对利用软件绘图和模拟机械的三维设计感兴趣,在校期间积极参与学校培训,熟练掌握NX、AutoCAD的使用,现已成为一名NX中级工程师。课余时间学习了解当前机械领域的重点方向——机器视觉,学习对视觉应用的光学设计仿真。同时,作为一个科技爱好者,了解机械领域的行业标准,热衷于分析产品功能的实现的逻辑原理。对于利用互联网技术进行智能制造也非常感兴趣,因为利用互联网技术更有助于生产制造,改进传统的生产流程,生产模式。可以这样说,智能化就是制造自动化的发展方向。所以自己对程序的开发也非常感兴趣,这也是自己申请此项目的根本动力所在。
已有的实践创新成果
1. 在大一上学期,我在大学生科技协会与协会成员共同学习与制造了利用Arduino设计的称重模型。通过这次小制作很大程度上锻炼了我们的动手能力,并激发了我们的更多的创意想法。
2. 大二上学期,我参加了省级技能竞赛项目《机器人集成技术》赛项,担任机器人操作与视觉检测角色,运用欧姆龙视觉检测,解决对汽车轮毂标签、二维码的识别读取,解决对轮毂的正反判断,解决通过机器人的旋转检测轮毂的当前旋转角度。
其它
申请此次基于电润湿液体透镜的充电插头智能检测系统项目,既是基于自己的兴趣爱好,渴望通过开发出适合实际生产环境的实用产品,提升机械行业的生产效率。同时也是希望自己能够学以致用,在校期间将自己的所思所学用于实践创新。将所学知识充分运用起来,通过市场调研、需求分析到最后的产品原型设计与打磨调试。让自己亲历真实的项目开发流程。也希望在实践创新的过程中能够与身边的专业老师与同学有更多的交流、合作。希望,通过自己的努力能够为国内机械视觉行业的规范化、规模化、标准化提供相对完善的技术解决方案。长远看来也有助于促进国内机械行业的良性竞争。
二、项目方案:
1、项目研究背景(国内外的研究现状及研究意义、项目已有的基础,与本项目有关的研究积累和已取得的成绩,已具备的条件,尚缺少的条件及方法等)
国内外的研究现状及研究意义
2017年,工业与信息化部发布《高端智能再制造行动计划(2018-2020年)》提出了加快智能制造装备发展,并且推动重点领域智能转型,促进中小企业智能化改造;2020年,中共中央发布《中共中央关于制定国民经济和社会发展第十四个五年规划和二〇三五年远景目标的建议》提出了发展战略性新兴产业。推动先进制造业集群发展,培育新技术、新产品、新业态、新模式。在工业4.0时代背景下,“中国制造2025”战略快速深入,智能制造成为了现代制造 业的主要发展方向。发展高端制造装备产业,对加快制造业朝着智能化、经济化和绿色化方向转型升级,提高生产效率、产品质量和技术水平等具有很大的推动作用。机器视觉在智能制造中用于实现定位操控、特征识别、瑕疵检测、部件装配和分类计数等功能。光学变焦镜头作为视觉成像系统的关键部件,通过在一定范围内变换焦距,以调节影像大小和景物范围。传统的变焦光学系统由一系列焦距固定的透镜组成,利用光学元件结合复杂的运动实现变焦。变焦过程中需要对透镜组的运动轨迹精确控制,操作复杂、可靠性低、体积大和成本高,难以满足机器视觉在智能制造装备中的成像需求。因此,研发微型化、智能化、低功耗和低成本的新型变焦系统,成为许多研究人员追求的热点。
液体透镜是将液体作为透镜通过改变液体的曲率来改变焦距。较为成熟的液体透镜是利用介质上电润湿(EWOD)原理的可变焦光透镜。它可以通过外加电压改变液滴的形状,进而改变其焦距。液体变焦技术作为一种新型的变焦方式,通过改变液体透镜的形状或折射率来实现焦距的调节。液体变焦镜头无需复杂的机械部件,大大简化了光学成像系统结构,符合智能制造装备的发展趋势。
项目已有的基础
1. 基于固定焦距的视觉检测场景,使用康耐视相机,完成了校企合作项目汽车减震盘弹簧有无、堵头有无等缺陷视觉检测;
2. 基于固定焦距的视觉检测场景,使用信捷相机,完成了校企合作项目芯片字符缺陷检测;
3. 基于液体透镜的自动变焦技术,完成了校企合作项目零件尺寸测量装备的之恶能检测装备研发;
4.关于本项目,查阅了相关资料,调研了企业一线,已完成作品的整体结构框图。
研究积累和已取得的成绩
我们团队研究了液态镜头的应用方向,掌握Zemax软件的使用,同时可自行开发相应的算法程序。
已具备的条件
本项目组的成员来自相关的专业,这让我们在理论知识上可以互相补充,互相学习,且团队成员成绩优异且拥有丰富的项目经验,动手能力很强,并且大家都具有勇于探索的精神,进而能更好的完成我们的作品。团队与机器视觉相关企业有丰富的合作基础,具备开发视觉应用场景的基本开发能力。
尚缺少的条件及方法
我们项目组在产品应用方面尚缺少经验,这需我们去查阅相关资料及向专业的学
长老师请教。此外,在本项目所需的控制算法上尚缺乏,这需要我们去网上搜索资料
并向一些经验丰富学长以及相关的专业老师请教。
2、项目研究目标及主要内容
1)研究目标:本项目在于设计一种基于电润湿液体透镜的充电插头智能检测系统,基于液态镜头优秀的变焦能力,灵活的适应于复杂的生产环境,提高检测效率,应用Zemax仿真设计,在光学上检验设备可行性,减少前期投入成本,优化视觉算法,能高效完成充电插头尺寸和字符缺陷检测;
2)主要内容:企业调研学习、设备机械结构设计优化、算法设计,Zemax仿真设计、尺寸测量和字符缺陷检测视觉程序开发、设备安装调试等。
3、项目创新特色概述
1)采用液态镜头结合算法实现自动对焦;
2)采用Zemax软件仿真,验证设备可行性
3)应用亚像素技术提高成像清晰度
4)基于自动变焦的尺寸测量和字符缺陷检测功能的半开放平台开发。
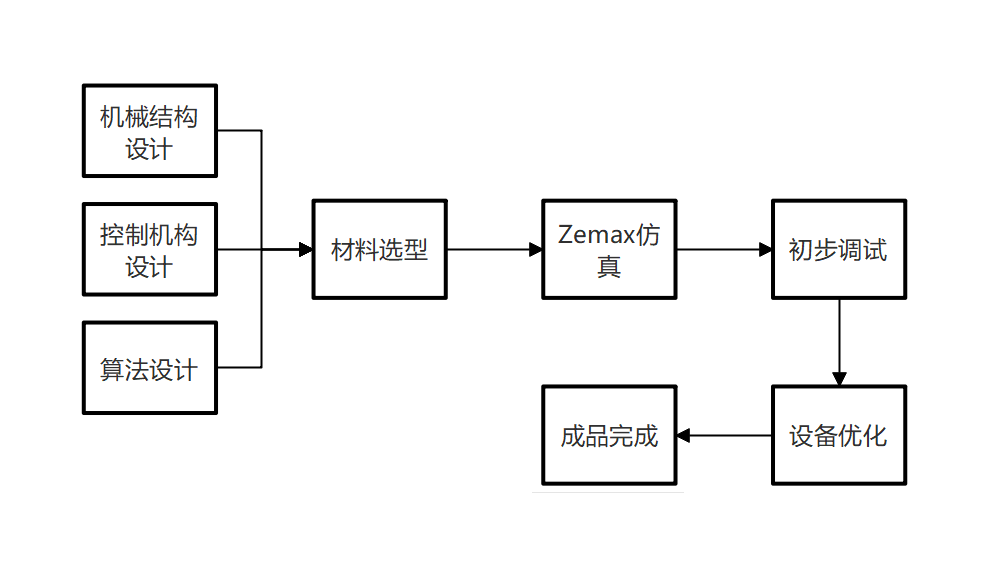
4、项目研究技术路线
5、研究进度安排
2021年5月至2021年9月 完成完成机械结构设计、零部件定制。
2021年9月至2021年10月 完成项目的机械结构的装配、液态透镜光学仿真设计;,控制算法的制作与调试。
2021年11月至2022年1月 完成基于液态透镜的自动变焦与自动切换算法开发与调试;
2021年2月至2022年3月 尺寸测量和字符缺陷检测功能的半开放算法设计与开发;
2022年4月至2022年5月 完成项目整体的调试、结题资料,书写总结报告,准备结题。
6、项目组成员分工
方骞 项目第一主持人,主要负责项目的架构设计,技术实施
徐程程 项目组成员,负责Zemax仿真设计;
谭青芳 项目组成员,负责资料整理及归纳。
三、学校提供条件:
1.相关扶持政策:学校制定《无锡职业技术学院创新创业教育项目实施办法(试行)》(锡职院〔2013〕23号)文件。
2.学校提供实训实验室及工具使用。
3.学校配备专业的指导老师给予指导。
4.学校提供配套经费6
000。
五、经费预算:交通费:6(%),资料费:6(%),元器件费:46(%),药品费:0(%),测试费:30(%),邮费:6(%),复印费:6(%),办公用品费:0(%),版面费:0(%),通讯费:0(%)